So far in my quest to build a synthesizer, I’ve controlled a Game Boy synth with a linear potentionmeter and made a pressure sensing circuit for the SoftPot. Today I want to make an analog delay using a bucket brigade device.
To do this, I used a BL3207 bucket brigade device, and a BL3102 clock generator, which are clones of the MN3207 and MN3102, respectively. The datasheets for the former are a single page and not of much use, but since they are clones, the original datasheets provide more useful information. Most importantly, this reference circuit.
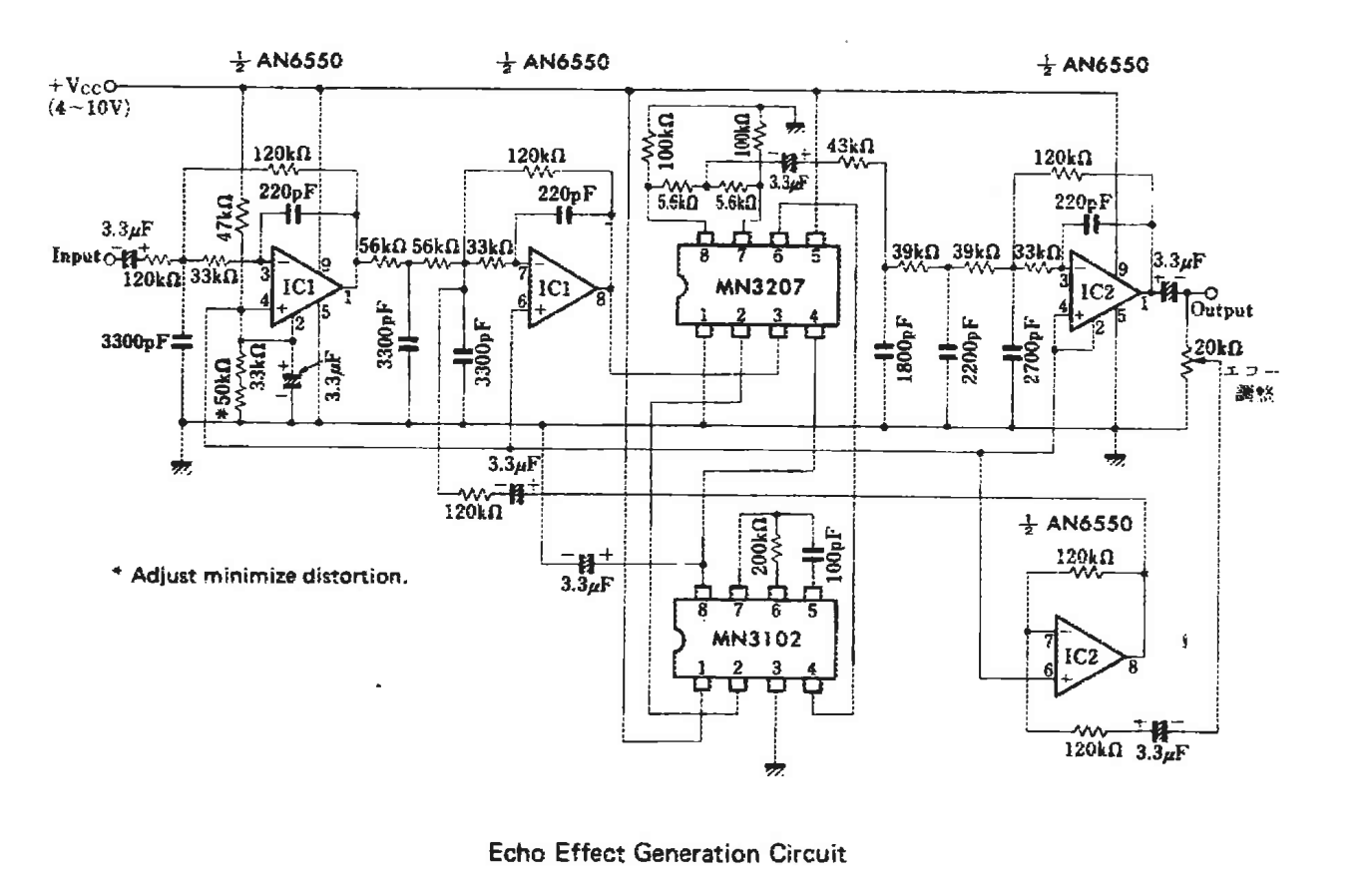
I did not build that exact circuit, but kind of used it as a hookup guide for the two chips. The MN3102 basically uses the RC filter to generate two opposing clock signals. It also generates a special voltage that’s 15/16 of Vdd for some reason. The MN3207 then takes an analog input, and with some pull-down resistors, produces a delayed output signal. In the above circuit there is a lot of filtering going on, while my circuit uses a simple first order RC filter for now. Both the delayed output and the input signal are fed into an opamp adder to make a nice feedback loop. In the above video I’m simply turning the feedback gain.
To be honest, the current circuit sounds quite bad and is not very flexible. It just adds a fixed delay and loops it back on itself, going from inaudible to metallic to oscillating in the blink of an eye. The best sound I got out of it is the click track when it’s almost oscillating and becomes this funny tone by itself. Maybe all of the filtering in the reference circuit make it a lot better, but I have some other ideas.
I have like 5 of these delay chips, so it’d be fun to chain them together for a longer delay. The other thing is the clock generator: You can disconnect the RC and drive the oscillator externally. I’m thinking I could create an external clock, and modulate that with an LFO to create a vibrato effect.
Update: Vibrato works like a charm. I simply drove the clock with an Arduino as follows. Then I played a sine wave and some acoustic guitar into it for demonstration.
void setup() {
}
void loop() {
int i;
for(i=0; i<2000; i+=30) {
tone(2, 40000+i);
delay(1);
}
for(i=2000; i>0; i-=30) {
tone(2, 40000+i);
delay(1);
}
}