Just as I was thinking about what it would take to make a mars rover with the NXT, I found the dSolar panels from Dexter Industries. How cool is that, a mars rover that actually runs on solar cells!
However, $100 seems a bit expensive for such a nice-to-have feature. Looking around on eBay revealed you can get more power for half the money, only it doesn’t come in a LEGO friendly package.
I bought them anyway, and documented the customizations. Soldering iron required!
So basically I connected the panels in parallel with a few plugs from an old computer. The whole thing is connects to the NXT via 2 fake batteries made of hot glue cartridges. To prove it really works:
I am at the moment working on a servo controller for the LEGO NXT based on the PICAXE 20X21.
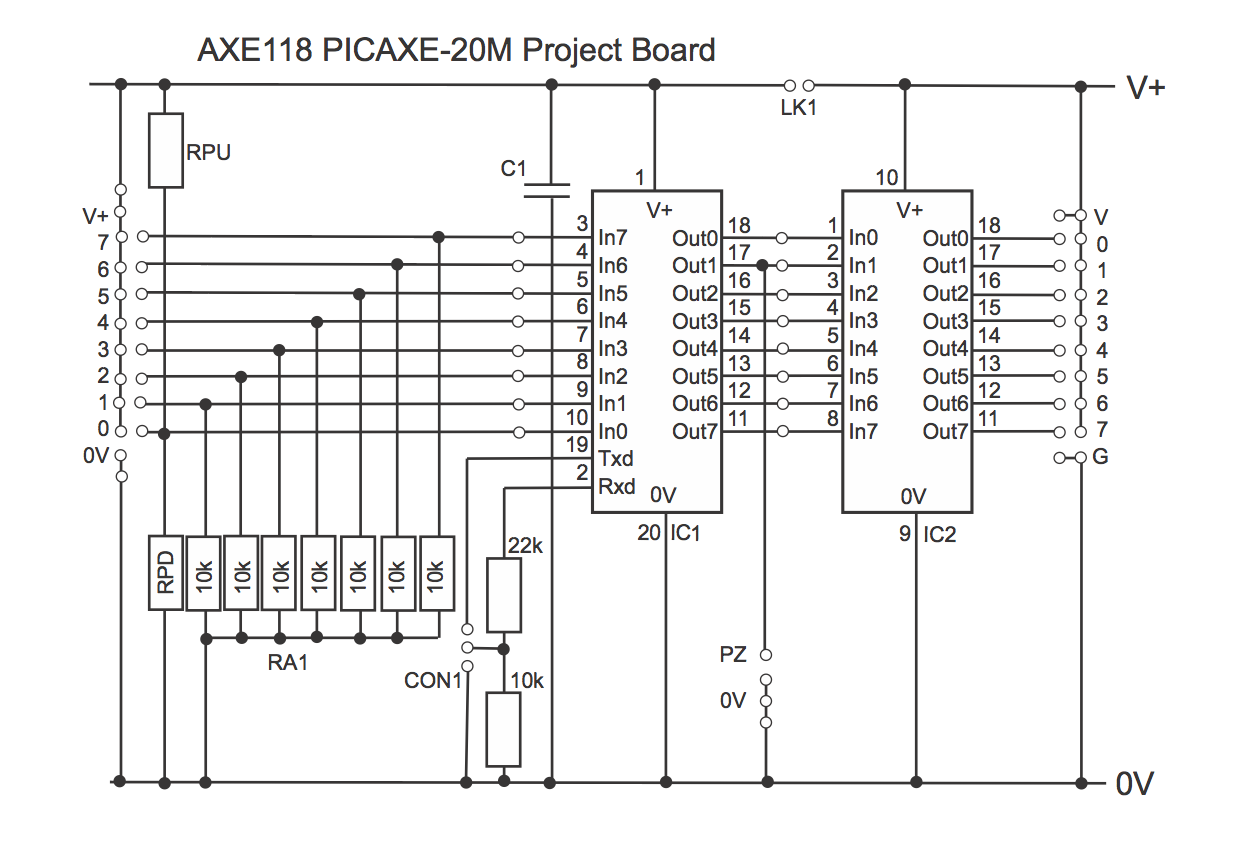
When you design a circuit, you usually use schematics like these:
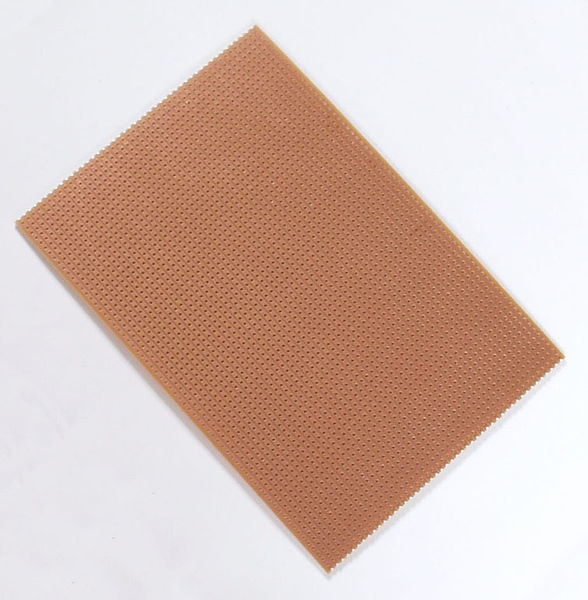
However, when you actually want to solder the circuit, you either get a PCB, or you use stripboard, which looks like this:
It is basically a board full of holes, with horizontal copper lanes connecting rows of holes.
All you have to do is insert the pieces so that things that should connect are on the same lane. To make things even easier, you can break lanes, or join lanes with a wire link.
Wait a moment… If we lay out the components like on the schematic, nothing will connect correctly!
Right, this brings me to the meat of this post. How can we automate this, to get an optimal and flawless translation from what is basically a graph, to a set of lanes?
I think the best tool for this job is constraint logic programming, of which cKanren is a neat implementation on top of MiniKanren.
Our program is somewhat related to the N-Queens problem, for which a solution is implemented in section 4.2 in the cKanren paper.
In he N-Queens problem, N queens must be arranged on an NxN board, so that no queen attacks another queen. This is implemented using all-difffd2, which forces the queens to all be on different rows, columns and diagonals.
Likewise, we can require our components to be all-difffd when it comes to lanes, but our situation is a little more complicated.
Components have multiple points which have constraints of themselves3
Lanes need to be broken under uC’s and might be broken for compactness.
Lanes might need to be joined with a wire link.
Let me state right away that I have not solved all of these complications, but I’ll let you in on my thought process.
For starters, lets define lanes as a finite domain of numbers. This allows us to use all-difffd, but gets us in trouble when we need to express broken lines.
(fresh(lane)(infdlane(range050)))
In this simplified version, I also just defined components as a list of points they are connected to. Components that are connected, use the same fresh variable. This also gets us into trouble when we insert wire links.
The latest in chocolate breaking technology! Using patented breaker technology, bar after bar is transported and broken off. No animals where harmed in the making of this robot.
My father eats a lot of chocolate, so the original idea for this robot was for it to keep track of and limit your chocolate eating. Unfortunately the NXT doesn’t keep track of the time, so you could just restart the program and eat more.
A solution to this problem would be to use the Mindsensors realtime clock, which costs $20, but since I have no intention to actually keep this robot around, I just used it as a dispenser for the weak and lazy.
Chocolate is fed into the back of the robot and is then transported to the front. A light sensor detects the foil and aligns the chocolate to the front edge. I keep the foil around the bar to make detection easy and to keep my LEGO clean.
When the button is pushed, one bar is extended over the edge and broken off by 2 NXT motors. Check the NBC code: